Ultra HD mapy.
Řešení pro rychlejší vývoj asistenčních a autonomních systémů (ADAS/AD).
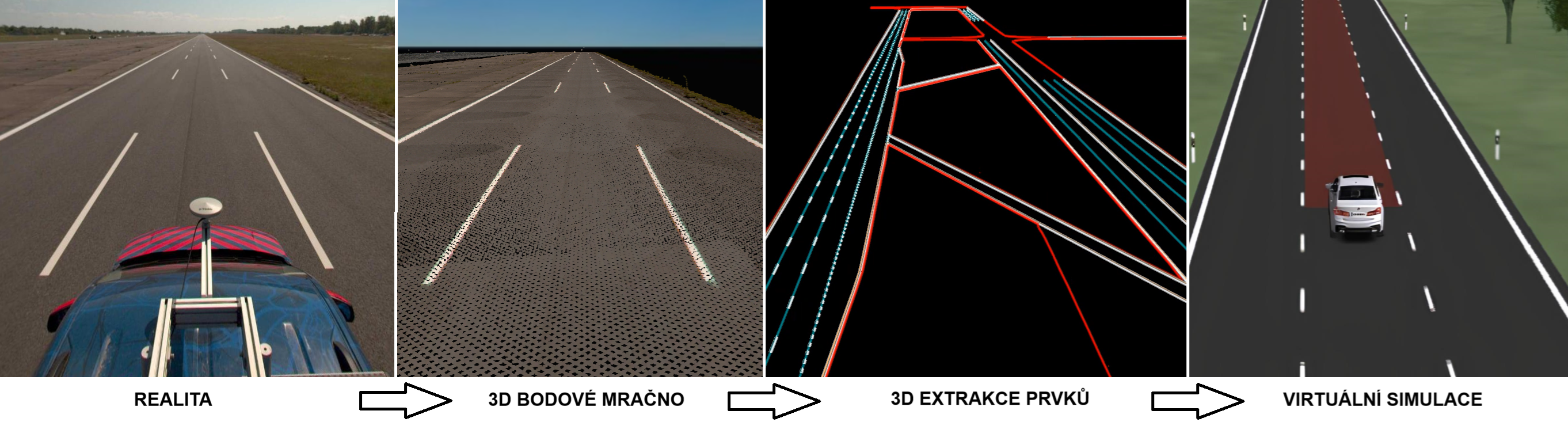
Od reálného světa k digitálním simulacím
Zachycení reálného prostředí s centimetrovou přesností
Mobilní mapování poskytuje detailní a konzistentní 3D obraz prostředí.Bodové mračno jako spolehlivá referenční data
Vysoce přesná data pro validaci polohové přesnosti ADAS/AD systémů.Automatizovaná extrakce klíčových prvků infrastruktury
Jízdní pruhy, okraje vozovek, vodorovné a svislé značení, geometrie komunikací.
HD mapy připravené pro validační a testovací scénáře
Převod reálného světa do datových modelů vhodných pro testování.Virtuální testování a validace bez omezení provozu
Zrychlení vývojových cyklů a snížení nákladů oproti testování v reálném prostředí.Podpora vývoje ADAS/AD technologií
Bezpečné a opakovatelné testování komplexních jízdních scénářů.
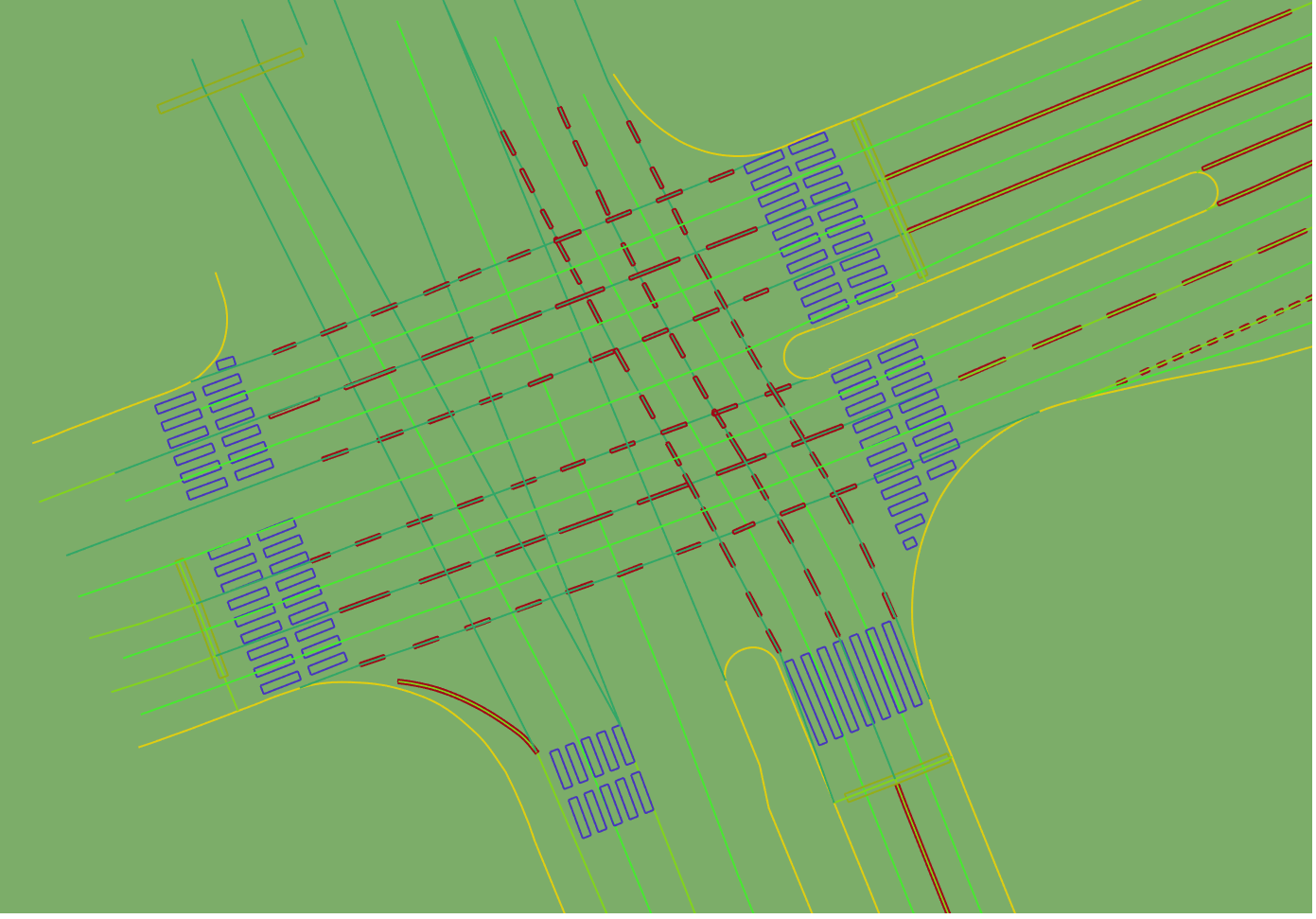
Extrakce prvků
Automatizovaná extrakce silniční sítě z bodového mračna
Přesná identifikace komunikací, jízdních pruhů, křižovatek a dopravních prvků jako základ pro tvorbu HD map.Centimetrová geometrická přesnost referenčních dat
Vysoce detailní a garantovaná data vhodná pro vývoj, validaci a simulace ADAS/AD systémů.Model vozovky a jízdních pruhů
Jasně definovaná geometrie vozovky, pruhů a napojení umožňuje přímý a validovaný převod do formátu OpenDRIVE.Podpora komplexních infrastrukturních prvků
Křižovatky, odbočovací větve, ostrůvky, přechody, obrubníky, vodorovné i svislé značení a další referenční objekty.
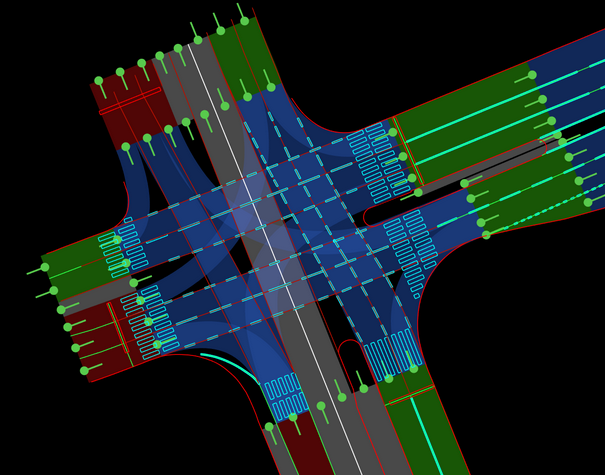
Model křižovatky
Topologicky a funkčně správný model křižovatky
Správné návaznosti jízdních pruhů, směrů jízdy a pravidel provozu v souladu se standardem OpenDRIVE.
HD mapa jako základ digitálního dvojčete
Věrný 3D popis reálného prostředí využitelný pro simulace, virtuální testování a validaci autonomního řízení.Kompatibilita se simulačními platformami
Výstupy optimalizované pro simulátory IPG CarMaker, ADAMS a dalších platforem využívajících standard OpenDRIVE.
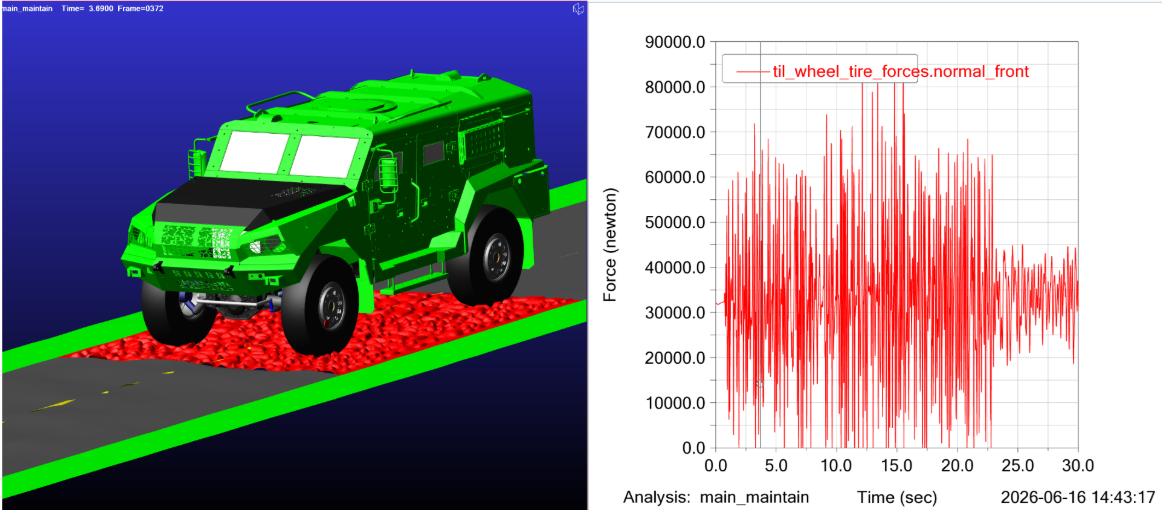
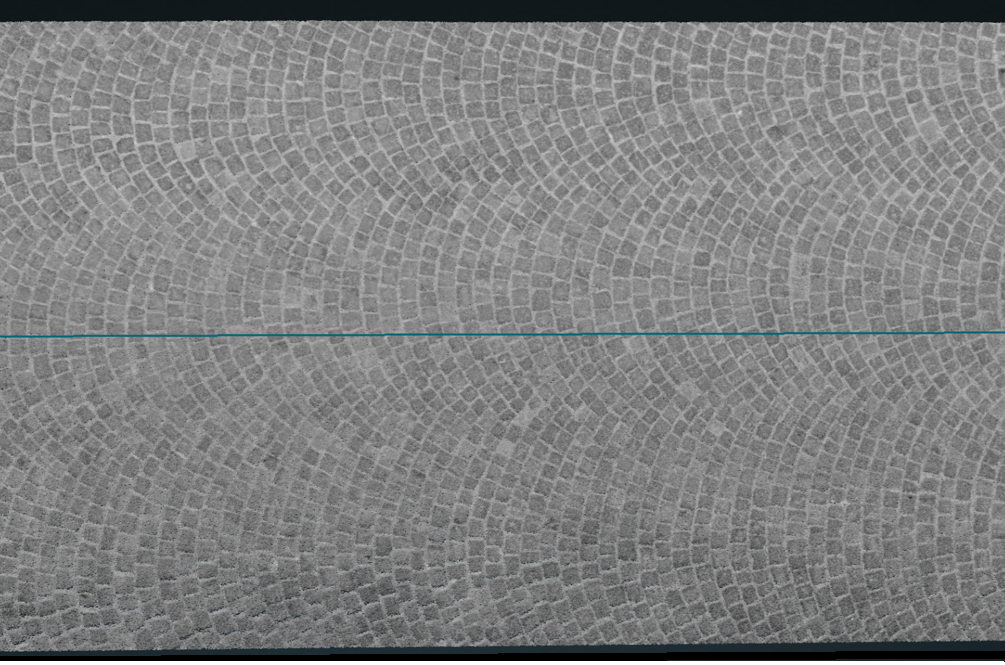
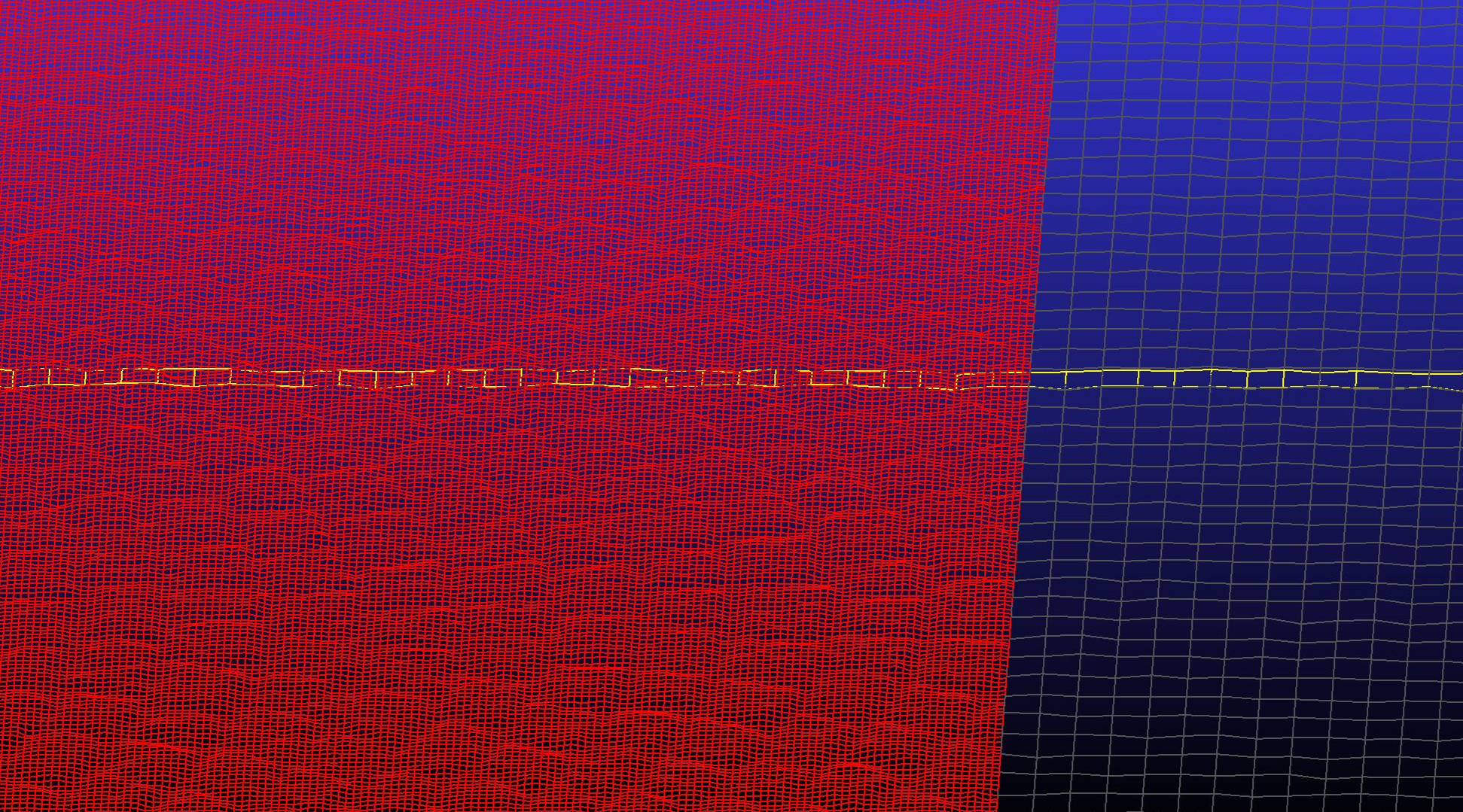
ASAM OpenCRG® - Detailní model povrchu vozovky
Samostatný standard pro modelování povrchu vozovky
Detailní popis povrchu vozovky pomocí standardu OpenCRG, použitelný samostatně i v kombinaci s OpenDRIVE.Mikrogeometrie povrchu v centimetrovém detailu
Zachycení nerovností a lokálních výškových změn pomocí zakřivené rastrové mřížky.Variabilita povrchu v simulačních scénářích
Snadná výměna nebo kombinace OpenCRG dat umožňuje porovnávat různé jízdní podmínky nad stejnou silniční geometrií.
Realistické fyzikální chování vozidla
Přesnější simulace odezvy podvozku, vibrací, trakce a kontaktu pneumatik s vozovkou.Kontrolovaná aplikace na vybrané úseky komunikace
Možnost přiřazení OpenCRG dat pouze na konkrétní segmenty vozovky podle potřeb testovacího scénáře.Standardizovaný formát pro přenos dat
Podpora ASCII i binárního formátu OpenCRG pro efektivní práci s daty a simulačními nástroji.
HD mapa testovacího polygonu
Reference
"Společnost CEDA Maps pro nás kompletně digitalizovala testovací polygon a vytvořila HD mapu hlavní testovací tratě ve formátu OpenDrive. Tento krok výrazně rozšiřuje naše možnosti testování asistenčních systémů v rámci vývojových procesů, včetně jejich simulace ve virtuálním prostředí."
Lukáš Pařil, manažer globálních systémových validací ADAS, provozu vozidel a regulací ve společnosti Valeo
Potřebujete vytvořit HD mapu reálného prostředí?
Kontaktujte nás, navrhneme řešení přesně pro váš projekt.