From the real world to digital simulation
Capturing real world environments with centimeter level accuracy
Mobile mapping provides a detailed and consistent 3D representation of the environment.Point clouds as reliable reference data
High-precision data for validating the positional accuracy of ADAS and autonomous driving systems.Automated extraction of key infrastructure elements
Lanes, road edges, road markings, traffic signs, and road geometry.
HD maps ready for validation and testing scenarios
Transforming real world data into models suitable for simulation and testing.Virtual testing and validation without affecting real traffic
Accelerate development cycles and reduce costs compared to real world testing.Supporting ADAS and autonomous system development
Safe and repeatable testing of complex driving scenarios.
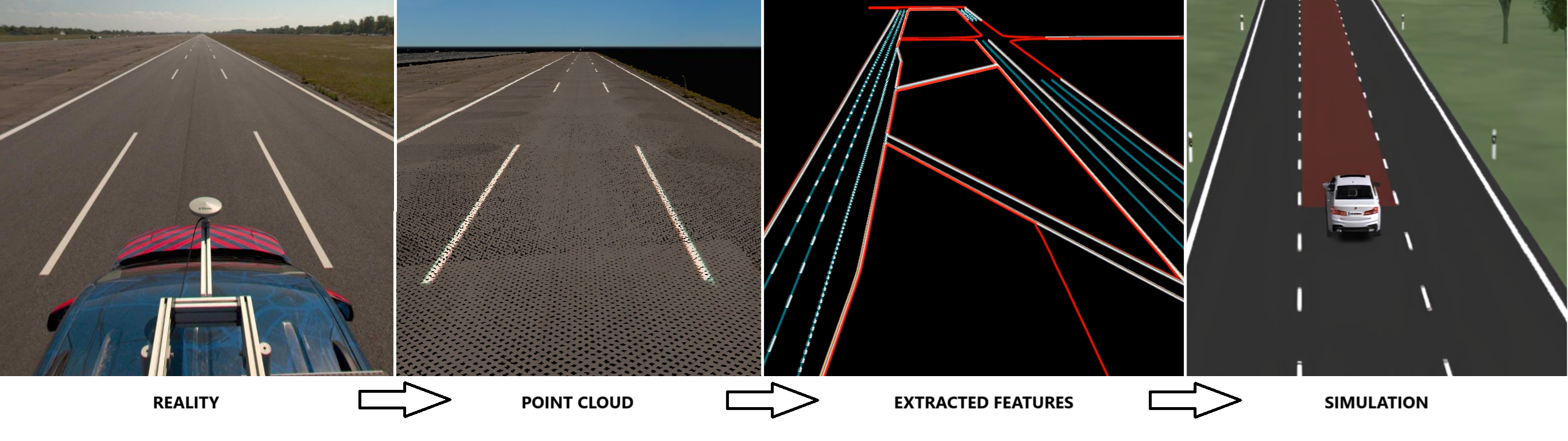
Feature extraction
Automated extraction of road networks from point clouds
Accurate identification of roads, lanes, intersections, and traffic elements as a foundation for HD map creation.Reference data with centimeter level geometric accuracy
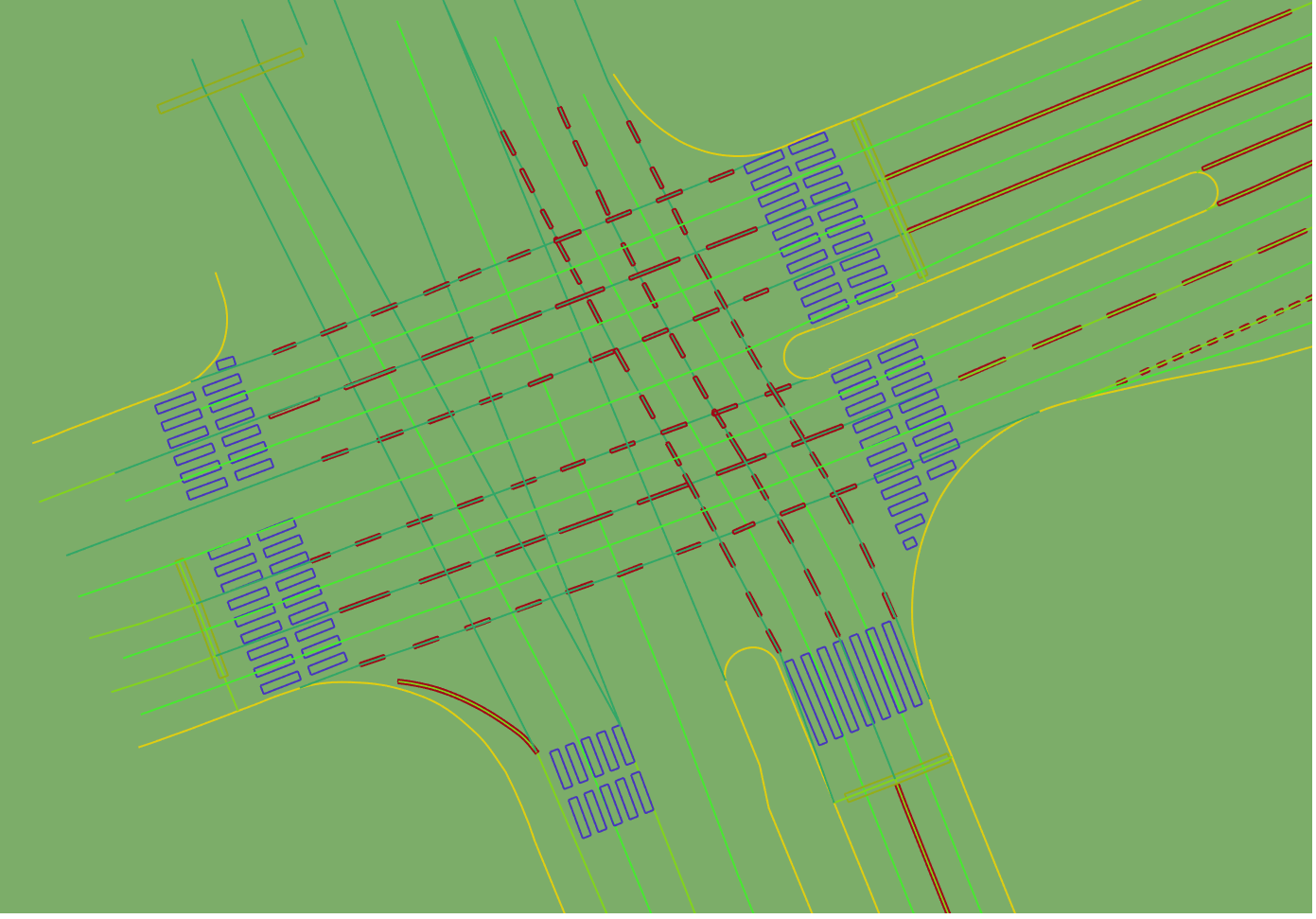
Highly detailed and reliable data suitable for ADAS and autonomous system development, validation, and simulation.Road and Lane model
Well defined road and lane geometry, including connectivity, enabling direct and validated conversion to OpenDRIVE.Support for detailed infrastructure elements
Intersections, slip roads, traffic islands, crosswalks, curbs, road markings, traffic signs, and other reference objects.
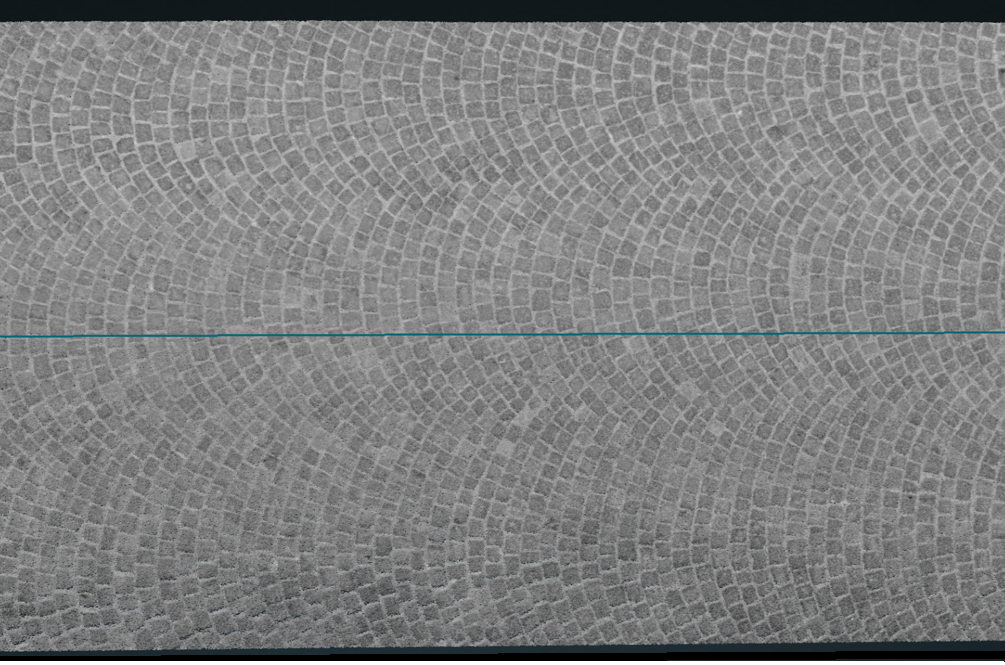
ASAM OpenCRG® - Detailed road surface modeling
A dedicated standard for road surface modeling
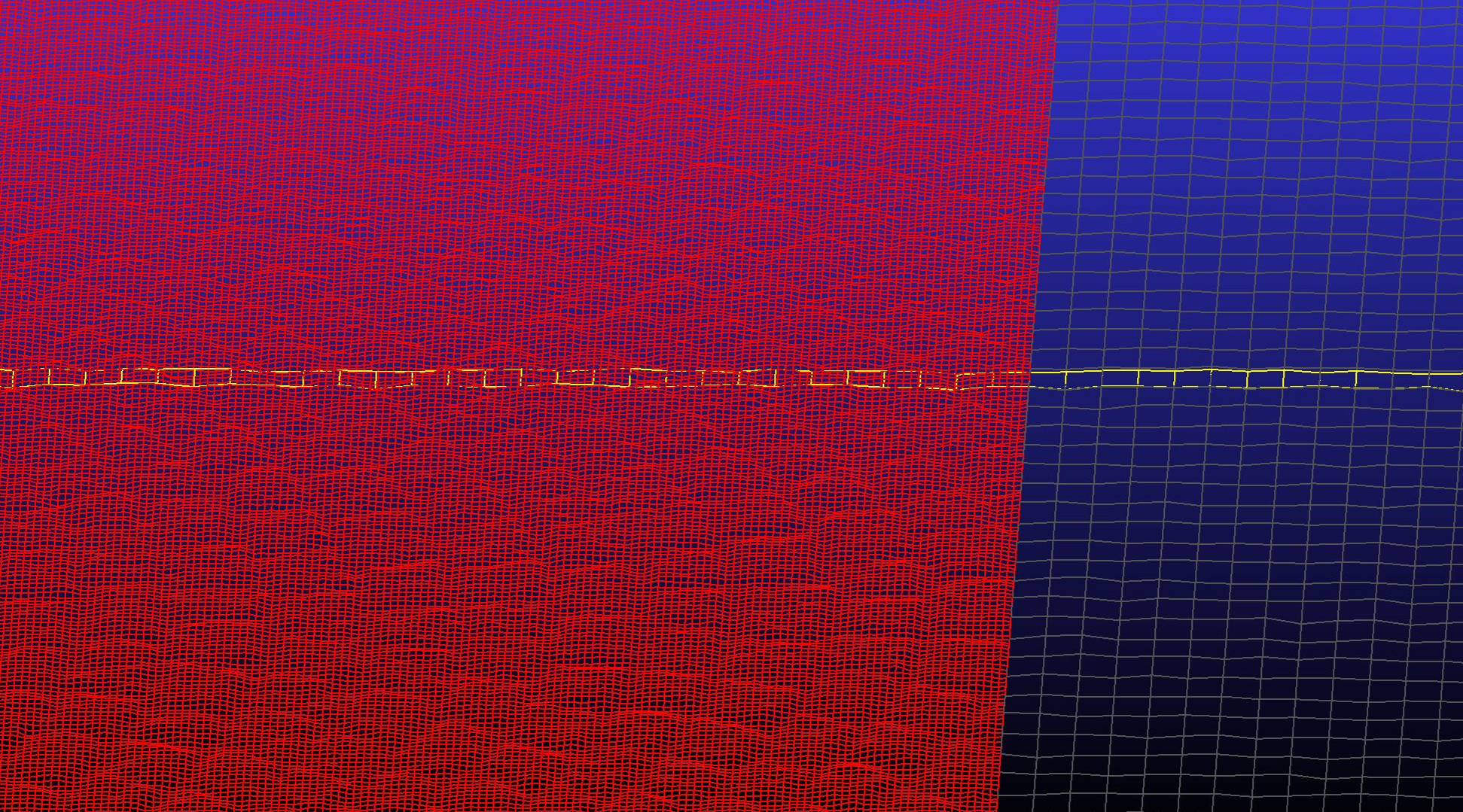
Detailed representation of road surfaces using the OpenCRG standard, applicable both independently and in combination with OpenDRIVE.High detail road surface microgeometry
Captures surface irregularities and local elevation changes using a curved raster grid.Flexible surface conditions in simulation
Easily swap or combine OpenCRG datasets to compare different driving conditions on the same road geometry.
Realistic vehicle dynamics
More accurate simulation of suspension response, vibrations, traction, and tire road interaction.Selective application to specific road segments
Apply OpenCRG data only to selected sections of the road network based on scenario requirements.Standardized data format for exchange
Support for both ASCII and binary OpenCRG formats for efficient data processing and simulation workflows.
HD map of the test track
Reference
"CEDA Maps fully digitized our test polygon and created an HD map of the main test track in OpenDRIVE format. This step significantly enhances our testing capabilities for driver assistance systems within the development process, including their simulation in a virtual environment."
Lukáš Pařil, ADAS Global System Validation Vehicle Operation and Regulation Manager
Need an HD map of a real-world environment?
Contact us and we’ll design the optimal solution for your project.